Controllers: Direct vs. reverse-acting control

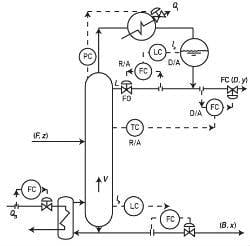
Figure 1. Action selection if valve failure is to result in full reflux, and if under normal operation, the distillate flow is manipulated to keep the column temperature constant while the accumulator level is controlled by manipulating the reflux flow.
Q: As I understand it, if the controller output increases when the measurement value rises, it is a direct-acting controller, and if controller output decreases when the measurement rises, it is a reverse-acting controller. In addition, at minimum output of the controller, the desired fail-safe action must be achieved. For example, if we have two controllers on a distillation column—reflux and net overhead—where the reflux control valve is fail-open, and net overhead control valve is fail-close, the reflux controller will be reverse-acting, and the net overhead controller will be direct-acting. Is my understanding correct? - Vasant Warke / [email protected]
A: Valve failure position and controller actions are independently determined, therefore, let's talk about them separately.
Valve failure position is determined by safety considerations. If, in case of failure, you want your column to go on full reflux, your selection is right (Figure 1). Assuming that the valve actuators are spring-operated pneumatic ones (you did not say what they were), and assuming that you define "failure" as the loss of air supply, the spring will act to open a fail-open (FO) valve and to close a fail-closed (FC) valve, regardless what the controller actions are. (I neglect to mention the role of positioners because I don't like to use them on flow control valves because they can be slower than the flow process and, therefore, they can cause cycling.)

Now let's turn to the subject of controller action. Assuming that your system is as shown in the figure, an increase in column temperature should result in increased cooling, which is accomplished by returning more cold reflux into the column. This means that the temperature controller (TC) has to reduce the reflux flow setpoint, which in turn will increase the level in the accumulator, and to overcome that, the level control (LC) increases the setpoint of the reflux flow control (FC). So a measurement increase requires the TC to reduce its output (reverse action, R/A), while the LC increases its output upon a level increase (D/A). The response of the slave FC controllers is to increase the flow through their valves as the master raises their setpoint, so with the FC valve, it will be D/A, and with the FO valve, it will be R/A.
Naturally, the control system shown in the figure is a very simple one (does nothing about interactions, etc.), but it is sufficient for explaining the issue at hand.
Béla Lipták
[email protected]
A: Direct action means that the controller output rises if the measurement increases. Indirect (reverse) action means that the controller output drops when the measurement rises.
Al Pawlowski, PE
[email protected]
A: Not quite right. The control valve failure action (and sometimes the valve positioner action) is also relevant. To ensure that you have an overall negative feedback, you need to follow the entire loop from sensor (increase/decrease output as variable increases) through the controller (where you can reverse the gain) to the positioner (normally direct action, but foolish folks sometimes try to hide mistakes there by reversing output) to valve (does increasing stem position increase or decrease the measured variable?).
Ian H.Gibson
[email protected]
A: The controller action is relative to the definition of the error. If error = setpoint – process variable, then a reverse-acting controller will cause the process variable to decrease when the controller output increases, and vice versa.
Valve fail position is not a function of the controller, but a function of safety, or zero energy in case of a failure in the energy supply to the final control element. DCSs have different ways to deal with fail position and controller action, and the configuration should be made according to what make sense to the operation.
Sigifredo Nino
[email protected]
A: I usually like to look at the error reading in the controller, meaning the difference between setpoint and process variable. If an increase in error increases the controller output, it's direct-acting. If increase in error causes controller output to decrease, it's a reverse-acting controller.
Hiten A. Dalal, PE, PMP
[email protected]
A: The question I always ask is: when the measurement increases, what does the controller output need to do to bring it back to setpoint? For example, if a back-pressure controller (where a control valve opens to decrease the pressure measured upstream of it) sees a rise in pressure, it should increase its output. Increase measurement/increase output is "increase/increase" or direct-acting.
In contrast, nearly every flow controller I've seen is "increase/decrease" or reverse-acting. Mr. Warke's reflux loop would be reverse-acting. We want the valve to be "closed" when the controller output is 0% and "open" when it is 100%, regardless of the valve's failure position. This makes it consistent for the operator. So when the controller sees an increase in flow, it must decrease its output (close the valve) to return it to setpoint.
I don't think you can generalize in terms of application. Even though a direct-acting flow loop is rare, you could design one or encounter one. If we were dealing strictly with old pneumatics or self-contained mechanical controllers, then your reflux example would be "direct-acting." The pneumatic controller would have to increase its signal in response to an increase in flow.
A level controller, whose output controls the valve on the tank inlet, is reverse-acting, but if the valve is on the outlet, it becomes direct-acting. A temperature application can be controlling cooling water to an exchanger (direct) or a cooling water bypass (reverse) I can't think of a way to make up a rule for a clerk or a computer algorithm that states some simple "if this, then this" for direct- or reverse-acting. Maybe I'm slow, but I still have to think through each application.
John Rezabek
[email protected]
A: I believe you have your cause and effect backward. Think only of the controller. Consider the input (process variable) to the controller as the cause and the controller output as the effect. If the controller is set for direct-acting, then an increase in PV will cause the output to increase. If the controller is set for reverse-acting, an increase in PV will cause the output to decrease.
To make the correct setting for direct/reverse-acting, you have to consider the process effect all the way from the controller output to the process variable. Does a controller output cause the valve to open or close? Some valves are fail-open; some are fail-closed. Does an increase in valve position cause the PV to go up or go down? Opening a steam valve to a heat exchanger (HX) would cause the HX output temperature to rise, whereas opening a cooling water valve would cause the HX output temperature to go down.
In summary, considering all the effects between the controller output and the PV, if an increase in controller output causes the PV to rise, or a decrease in controller output causes the PV to fall (that is, the PV moves in the same direction as the controller output), then the process can be called direct-acting, so the controller should be set for the opposite, reverse-acting. Thus, if a process disturbance causes the PV to rise, the reverse-acting controller will decrease its output. Consequently, this decrease in controller output will cause the direct-acting process variable to decrease, thus moving it in the opposite direction from that which caused the disturbance.
Harold Wade
[email protected]
A: I believe that your understanding of direct-/reverse-acting applied to control valves is correct. However, the fail-safe action has nothing to do with direct/reverse action. The failure action is dictated purely by the position of the spring against which the pneumatic diaphragm operates in the control valve actuator. They're defined independently when the control valve is specified (fail-safe action) and again during configuration of the control valve positioner or the controller outputting to the control valve (direct-/reverse-acting).
Dick Caro
[email protected]
About the Author

Béla Lipták
Columnist and Control Consultant
Béla Lipták is an automation and safety consultant and editor of the Instrument and Automation Engineers’ Handbook (IAEH).
