Solar Generators; Control Valve Boosters
QUESTION: I am designing a small organic Rankine cycle unit to produce about 1.2 kilowatts of electrical power. The working fluid is refrigerant R-134a. The heat source is a tank of solar heated water at about 150 °F. and the heat sink is the basin water in a swamp cooler or small cooling tower that will be at about 65 °F to 75 °F.
A copper coil immersed in the solar-heated water tank will serve as the boiler, and the condenser will either be a brazed plate heat exchanger or a copper coil immersed in the cooling tower or swamp cooler basin.
Electricty Generation
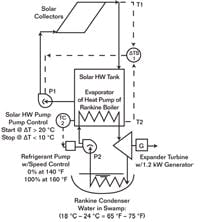
Heat-pump-assisted 1.2 KW solar electricity generator for a private
home.
An automotive scroll compressor will be converted to serve as the expander by removing the compressor’s check valve. The turbine will be shaft coupled to an alternator that will produce electricity. The pump will probably be a DC- electric motor-driven gear pump.
I am aware that turbines are typically speed controlled, and boilers are usually pressure controlled.
My question is how do I control this system? I have thought of two approaches:
- The boiler could be fitted with a pressure transducer that would serve as an input to a PID process controller. The PID controller would issue a 4-20 mA command signal to a device that would convert the signal to a pulse width modulated power output that would vary the gear pump’s motor speed to maintain constant boiler pressure.
- The shaft of the scroll expander could be fitted with a speed sensor that serves as the input to a PID controller. The PID controller would issue a 4-20 mA command signal to a device that would convert the 4-20 mA command signal to a pulse width modulated power output that would vary the gear pump’s motor speed to maintain constant expander speed.
In the first case, the boiler pressure would be controlled, but the expander speed would be uncontrolled. In the second case, the expander speed would be controlled, but the boiler pressure would be uncontrolled.
I’m not very comfortable with either case. Can you suggest the proper control solution?
Larry Bingham
[email protected]
Answer: Einstein said, “The future cannot be guided by the thinking of the past.” This also holds true for our profession. The control requirement of renewable energy processes requires new control strategies. So, while your plan to make your own electricity from solar source is good, I would not use either of your schemes, but would do the following.
The main variable in your process is the insolation. The changes in insolation are reflected by the temperature of the solar hot water. Therefore, a simple control scheme (Figure 1) is to look at both the temperature difference between the solar collector (T1) and the solar water tank (T2) and start the water pump (P1) when T1 > T2 by over, say, 20 °C and stop it when it drops to 10 °C using a differential thermostat ΔTC-1.
The same holds true for the Rankine cycle refrigerant pump (P2). Because the condenser (swamp) temperature is more or less constant, I would not bother with detecting the ΔT and would just look at the boiler (water tank – T2) temperature and keep P2 running whenever the T2 temperature is above 60 °C (140 °F), bringing P2 to full speed as T2 reaches, say 70 °C, controlled by TC-2.
If you want to maximize the efficiency of the system, you can do better than the above, but such an approach costs more, and I do not think it is justified. In that case, the measured variable would be the ΔT between the boiler and condenser waters (both variables). You would prepare a three-dimensional plot, where the coordinates are ΔT, refrigerant flow and net electricity production. The net electricity produced is the difference between the power generated minus pumping power invested. This three-dimensional surface will have a maximum value for each ΔT. You would read the flow corresponding to that maximum and set the pump speed to match it. With a large system (a geothermal power plant using ground water or a lake as its heat source), this might make sense. You might get another 10% more power, but with your system (where the basin temperature is relatively constant and the system is small),the effort required does not pay.
Béla Lipták
QUESTION: How do you select a suitable volume booster for a cylinder actuator + positioner for double-acting/ spring-return cylinder actuators? Is it possible to have an example of the selection process?
sanjay
[email protected]
Answer: The vendor should know what is really needed. If this is a new installation, I would purchase the system assembled and tested. If a retrofit, I would ask the vendor representative to make a recommendation, but use common sense to check it. In any event, be certain that the air supply is adequate. If a large actuator is involved, the compressed air source can easily limit the actuator speed. I have seen large air tanks installed near large valves in critical service, in this case, a large air compressor anti-surge valve.
Cullen Langford
Consultant
Answer: In my experience, inserting a booster between a positioner and valve actuator introduces dead band into the loop, resulting in a limit cycle when controlling pressure and liquid level. I do not recommend this practice.
My solution was to install a smart digital positioner on the valve, which provides faster stroking speed with no deadband. See the article, “Smoothing Out Compressor Control,” Chemical Engineering, Feb. 1999.
Greg Shinskey
Process Control Consultant
Answer: The selection of the boosters to be used is driven by the speed requirement for the open and or close time of the valve. The primary problem in using a booster to feed and/or exhaust an actuator is that instability may be caused in the valve positioning.
In selecting the booster size needed to meet a speed requirement most valve manufacturers would have a computer program to determine the actuator input and output Cv’s. An estimate of the Cv required to achieve a certain stroke speed can be determined by using the volume of the actuator and the time for a full stroke to establish a flow rate, then with the pressure drop estimate, one can ball- park a Cv of the booster needed.
It is rare for the presence of a positioner in combination with the booster to cause an instability that cannot be readily fixed using the booster capacity adjustment, unless the positioner itself has excessive gain relative to the size of the actuator.
Some rules of thumb in selecting a booster follow:
- The booster controlling the input to the actuator should have the largest Cv so that the input flow is helping to push out the exhaust air on the other side of the piston. If high speed in both open and close directions is required, then stability can be quite sensitive, and it may be necessary to trade off some overshoot in order to achieve the required stroke speed.
- Experience in using boosters for high speed operation indicates that just two booster sizes, Cv = 1 and Cv = 4 is enough for a wide range of valve sizes. One or more of the larger boosters would be used on the larger actuators generally associated with valve sizes 6 in. to 8 in. (125 mm to 200 mm) and larger. For unique applications, multiple boosters can be installed; even placing a Cv = 1 and a Cv = 4 boosters in parallel is not uncommon to achieve good small signal response while minimizing overshoot during large signal changes.
- Most instability problems occur when the input booster is installed with a quick exhaust valve on the other side of the actuator piston. The on/off nature of the quick exhaust and the tendency for quick exhaust valves to have excessive Cvs compared to boosters for the same nominal pipe size easily can cause excessive overshooting. You can minimize this by limiting the quick exhaust Cv relative to the booster Cv to no more than a 1.5:1 ratio, and by using a small booster to “pilot” the quick exhaust valve, so that it is shut off by the pilot booster as quickly as possible once the desired valve position is reached.
Herbert L. Miller, PE, Consultant
[email protected]
