Is Your Control Valve an Imposter?

Our process control expert and monthly columnist, Gregory McMillan, talks about modeling and controls. He shares his industry knowledge of more than 44 years of process control experience. McMillan is a member of the Process Automation Hall of Fame. Read McMillan's Control Talk Blog.
Check out ControlGlobal.com on Google+
Editor's note: This article is adapted by the author from one that appeared in Chemical Processing, October, 2007 - "Improve Control Loop Performance"
When I was leaving home for the first time, my dad said, "Be as honest as the day is long, and don't be fooled into using on-off valves as control valves." I was puzzled since I was only going to summer camp. Years later I realized that my Dad was warning me about the greatest hoax of the century in the automation business. Positioners were put on piping valves and sold as throttling valves. Who wouldn't want a lower-priced valve that was in the piping spec and had the name "High Performance" because of an exceptionally low leakage classification? The valve could serve as both a throttling valve and isolation valve. What a deal!
Users did not realize the flow characteristic was sometimes quick-opening and in many cases, too flat for large openings. Even more insidious was that the backlash and stiction was more than an order of magnitude larger than valves originally designed for throttling service. Adding insult to injury, poor precision pistons (e.g., link arm, rack and pinion, and scotch yoke) and less expensive positioners (e.g., spool instead of relay type) were used that deteriorated the resolution by a factor of five or more. The result was a dramatic increase in nonlinearity, dead time, response time, dead band and stick-slip.
Users were clueless as to the source of the limit cycles and increased process variability. Pneumatic positioners offered no position readback. Even more deceptive was the fact that many installations of smart positioners had actuator shaft rather than internal closure member position feedback. The actuator shaft would move even though the closure member did not. Diagnostics and response test metrics from the positioner said things were not too bad. The smart positioner was basically lying.
Nearly all control loops in the chemical industry depend upon the manipulation of flow by the use of a final element such as a control valve. It's generally taken for granted that, when a controller changes its output, there's an actual change in the position of the closure member of the valve (plug, ball or disk). However, the specification of control valves doesn't adequately emphasize the very basic requirement that the positioner respond in a timely manner or even at all, and this has resulted in shortcomings that introduce variability into the process.
Before the advent of smart HART and fieldbus positioners, feedback measurements of position were rare because a separate position transmitter had to be installed and wired. The user generally wasn't aware that differences in valve, actuator and pneumatic positioner design were the source of cycling in the process.
Typically, besides traditional factors such as size and materials of construction, control valve specifications have focused on minimizing leakage through the valve at shutoff and emissions to the environment from packing. Too often, to reduce project costs, plants pick on/off valves to address requirements. This can create performance problems that can't be fixed simply by adding a smart positioner. While installing a smart positioner is always beneficial, an incorrect feedback mechanism in the valve design can give a false indication of performance.
To avoid problems, always consider five basic valve requirements—linearity, dead time, response time, resolution and dead band. They can give crucial guidance and justification for a final element that leads to better control. Rangeability and sensitivity also are important, but, as we'll see, properly meeting the other requirements will address them.
Linear in a Nonlinear World
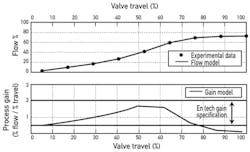
To get on a common basis, we need to define process gain for a self-regulating process as the final percent change in the controlled variable divided by the percent change in valve position. Note that the calibration span of the transmitter for the controlled variable is a factor. Because the changes seen in data historians for process variables are in engineering units, they must be converted to percent of scale. The maximum allowable controller gain is inversely proportional to the process gain. The process gain for flow is the slope on a plot of percent flow versus percent valve position (travel).
The plot should reflect the installed flow characteristic, not the inherent trim characteristic. This accounts for the reduced pressure drop available to the control valve at higher flows, because of the increase in pressure drop in the rest of the system from frictional losses and a decrease in pump discharge pressure. The changing valve drop makes an equal-percentage trim more like a linear characteristic, and a linear trim more like a quick-opening characteristic. The effect increases as the valve pressure drop as a percent of the total system pressure drop is decreased.
In Figure 1, we see the process gain gets too low for travel above 80% of a sliding stem valve. The control loop must make large changes in position to change the flow. For similar conditions, a ball or butterfly with a 60° maximum rotation would see a corresponding excessive loss of sensitivity at about 60% travel, a typical problem for high-capacity valves.
If the pressure drop across the control valve is large compared to the pressure drop in the rest of the system, as in pressure letdown, reagent, surge and vent valves, the installed characteristic is the inherent characteristic. For an equal-percentage trim, the nonlinearity is extreme (process gain can change by a factor of 50) because the slope of the characteristic is proportional to flow. If a pH loop directly throttles a reagent valve on a static mixer, this change in slope on the valve characteristic compensates for a change in process gain for pH that is inversely proportional to flow.
A quick-opening trim characteristic provides initially a very high process gain followed by a very low process gain. This nonlinearity is accentuated in the installed characteristic and is generally undesirable because it magnifies resolution problems near the seat, and causes an excessive loss of sensitivity even at mid-range throttle positions. Pinch valves and isolation valves designed for on/off service tend to have this characteristic.
Turning on a Dime or at Least a Quarter
Dead time and response time quantify dynamic response. The dead time, Td, is the time to a first change in closure member position after a change in signal. The response time, T86, is the time required for the position to reach 86.5% of its final value and includes the dead time. These parameters are defined in the ISA standard and report for the test and measurement of the response of the complete control valve assembly.
If you're looking just at the actuator, you can estimate the pre-stroke dead time and stroking time from an individual fill or exhaust parameter for the actuator type, and volume divided by the fill or exhaust flow coefficient for the positioner, I/P or booster. The response time for large changes is estimated as 86% of the desired change in valve position (%) divided by the slewing rate (%/sec.). For changes between 1% and 10%, the actuator response time becomes relatively fixed, except for large valves and dampers.
It always was rather obvious that large valves were slow because it takes time to fill or exhaust enough air in a large actuator volume to make a change in actuator pressure large enough to overcome the torque or friction load to move the closure element. However, until recently, it wasn't known that the response time of even small valves was dramatically slower, to the point of almost no response, because of the design of pneumatic positioners.

HART and fieldbus digital positioners generally have eliminated this positioner resolution problem. When you also consider that pneumatic positioners tend to lose their calibration and have no position feedback or diagnostics, there's considerable justification in terms of performance and maintenance for replacing such positioners.
In the days of analog control, a guideline advised using boosters instead of positioners on fast loops. With digital process loops and smart positioners, this no longer is an issue. It's essential that every control valve have a smart digital positioner. A booster, if needed on a large actuator to reduce pre-stroke dead time and stroking time, should be installed on the outlet of the positioner with the booster bypass adjusted to prevent cycling by allowing the positioner to see a small portion of the actuator volume.
Achieving Fine Results
Resolution and dead band play a crucial role in valve response and highly depend upon the total valve package. Resolution is the smallest change in signal in the same direction that will result in a change in position. Pneumatic positioners can adversely affect this, but an even bigger potential problem originates from friction in the packing and seating through a behavior known as stick-slip, where the valve closure member doesn't move (sticks) and then breaks free and jumps to a new position (slips). Older designs of high-temperature and environmental packing, as well as manual tightening of the packing beyond specifications can cause the resolution to deteriorate to 10% or worse.
A more insidious source of resolution problems is the high seat or seal friction particularly associated with valves designed for isolation. On/off (block) valves aren't control valves and vice versa. If an application must prevent leakage, install an on/off valve whose action is coordinated with the opening and closing of a control valve. If a valve must operate near the seat due to rangeability requirements, it's essential to ask the vendor for resolution measurements near the seat.
Don't rely on stated resolution because this normally is for the valve at mid-position where the seating or sealing friction is lower. High friction and the discontinuity in process gains near the seat cause loops to oscillate around the split range point where there is a transition from one valve to another. The realistic rangeability of a control valve (the largest flow divided by the smallest controllable flow) is set by the installed characteristic and resolution near the seat. Furthermore, repeatability isn't as important as the ability of the valve to respond, as the process loop will correct for changes in the magnitude of the response.
Dead band is the smallest change in signal in the opposite direction that will result in a change in position. The dead band also is known as backlash or lost motion because it primarily originates from shaft connections and linkages. It's particularly noticeable in rotary valves when there's a translation of linear motion of an actuator to rotary motion of the ball or disk. Don't count on rotary actuators as a solution; these actuators typically have been designed for on/off service and consequently don't generally provide adequate resolution and dead band specifications. The effect is aggravated by high sealing friction and may result in shaft windup where the actuator shaft twists, but the closure member is stuck and then considerably overshoots the desired position when it breaks free.

Resolution and dead band add a dead time to the loop beyond that due to the actuator and positioner. This can be estimated as the resolution or half of the dead band divided by the rate of change of the controller output. Resolution will cause a limit cycle (constant amplitude, persistent oscillation) in any loop regardless of tuning. For an integrating process, such as level with a controller with integral action or a cascade control system where both the primary and secondary controller have integral action, dead band also will cause a limit cycle.
The amplitude of these cycles is the resolution or dead band multiplied by process gain for the process variable of interest. For temperature and pH loops, this process gain can be 10 or more, and can cause severe oscillations and process problems. Whereas problems from nonlinearity and response time are triggered by disturbances and tend to die out if the controller is properly tuned, limit cycles are continual. A digital positioner with good closure-member feedback that is tuned with a high gain and rate action can reduce the amplitude of the limit cycles significantly.
For pH control, the resolution of a reagent valve can determine the number of stages of neutralization needed. A fine adjustment valve in parallel with a coarse adjustment valve simultaneously manipulated by a model-predictive controller can extend the sensitivity and rangeability of a reagent system enough to eliminate a stage.
Throttle Your Valve Problems
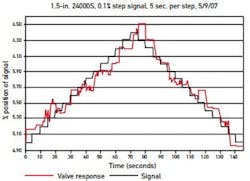
Figure 4. A sliding stem valve with a digital positioner can provide high resolution near seat.
A control valve package is only as good as its weakest link, whether it's the actuator, positioner, feedback mechanism, packing or valve design. If the control valve and actuator are similar to those used for isolation valves, you're a candidate for significant limit cycles (sustained variability) in your process. This is particularly a problem with packaged equipment (skids) where control valves are chosen based on piping specifications and lowest price rather than on loop performance. Cost-effective solutions exist.For example, a sliding stem valve designed for minimal seating friction and packing friction, coupled with a diaphragm actuator and a smart positioner, can reduce resolution and dead band to better than what you can achieve with a standard variable-speed pump. Figure 4 shows that even operating near the seat, a sliding stem control valve with a digital positioner can respond to changes as small as 0.1%.
About the Author

Greg McMillan
Columnist
Greg McMillan retired as a senior fellow at Solutia Inc., now a subsidiary of Eastman Chemical, in 2002. He was an adjunct professor in Washington University Saint Louis’ Chemical Engineering Department 2002-04, and retired as a principal senior software developer at Emerson Automation Solutions in 2024.
