This Control Talk column appeared in the May 2020 print edition of Control. To read more Control Talk columns click here or read the Control Talk blog here.
Greg: For unmeasured load disturbances on a process input, the proportional-integral-derivative (PID) algorithm has been shown in practice and proven in theory to offer the best performance in terms of minimizing the peak and integrated errors—provided it is well tuned and the correct algorithm Form and Structure are used. However, there are huge disagreements on tuning methods due to egos and history not realizing rules can often reduce to very similar settings if the objective is really load disturbance rejection. Furthermore, the confusion about PID Algorithms has made it difficult for the user to choose the best options for an application and to convert settings for PIDs from different suppliers. In this column we are seeking to address the first issue of PID Forms inconsistency and misinformation that is so prevalent today.
We are fortunate to have Peter Morgan, who, as leader of the ISA 5.9 Standards and Practices (S&P) working group for PID algorithms, has been able to gain considerable interest and progress in resolving many issues. I formed ISA 5.9 to generate a technical report. I was able to get Yamei Chen and Michel Ruel to be ISA 5.9 co-chairs and key experts to join me and Peter including Karl Astrom, James Beall, George Buckbee, Brian Hrankowsky, Sigifredo Nino, Russ Rhinehart, Jacques Smuts and Harold Wade.
These experts have demonstrated considerable enthusiasm in the first step of agreement on PID Forms. Contact ISA headquarters or your local ISA section if you would like to join the committee and help review or create the technical report with dedicated sections on PID Algorithms (e.g., Form, positional, velocity, anti-reset windup, tracking, feedforward), PID Structure (e.g., PID on E, PI on E, D on PV, I on E, PD on PV, I-only, P-only, 2DOF), External-Reset Feedback (e.g., Dynamic Reset Limit), PID Performance (e.g., integrated error, peak errors, rise/settling time, over/undershoot), and PID Signals (e.g., types, error checking, signal selection, rate limiting, scan rate, filtering).
There are appendices planned on Signal Characterization (e.g., Valve and VFD flow characteristic, pH), Dynamic Simulation (dynamic models to test and improve PID performance), Valve Positioners (algorithms, applications, performance, ISA 75.25), and Dead Time Compensators. The sections and especially the appendices are focused and are as concise as possible so that the total report length is about 120 pages and one can readily get to the heart of the matter.
Peter: The proportional plus integral plus derivative control algorithm is the work horse of virtually all closed loop control applications. It has been the “go to” algorithm since its inception about a hundred years ago and has been used by generations of control practitioners. The algorithm has seen (and survived) implementation on every technology platform ranging from pneumatics, electronic analog, centralized digital control, modular distributed control, programmable logic controllers and not least distributed loops on fieldbus and other distributed platforms.
Greg: Can you comment on the confusion caused by the wide variety of Form names for the three PID algorithms in common use?
Peter: While the behavior of the PID algorithm in its various Forms may be understood, that there has been no standard convention for naming each of the algorithm Forms has led to confusion and sometimes heated debate, when the adopted Form name suggests the property of the algorithm. A good example of the latter is the common use of the Form name “Non-Interacting” for the Parallel algorithm. This name, suggesting the behavior of the algorithm, for Gain, Reset and Derivative parameter adjustments, rightly expresses the behavior of the algorithm from a time domain perspective but not from a frequency domain perspective, when, if Gain is adjusted, the phase shift across the controller changes at a given frequency, requiring compensating adjustment in Reset and Derivative parameters during the tuning process.
In my own experience, due to the inconsistency in the naming convention adopted by vendors, I was never confident of which Form I was selecting unless I was able to verify it by reference to the PID equation provided in vendor documentation. The only exception being “parallel” when it is offered as an option, since it unambiguously defines the algorithm
Greg: What do we know of the range of names in use by practitioners and vendors?
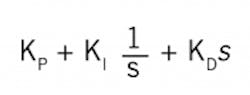
Peter: One of the earliest activities of the ISA 5.9 Committee was to survey members and review vendor documentation to determine the range of Form names adopted by vendors and practitioners. You’ll see below how numerous and sometimes contradictory the naming of the PID algorithm has been. Note that the algorithm given below are for “PID on error” and that alternate structures commonly used such as “PI on error, D on PV” and others, provide the same load disturbance response but differing response for setpoint changes.
Algorithm:
Variety of names in use:
- Parallel
- Ideal Parallel
- Non-Interacting
- Independent
- Gain Independent
- Independent Gains Form
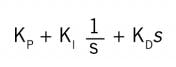
Algorithm:
Variety of names in use:
- Ideal
- Non-Interactive
- Interacting
- Standard
- Dependent Gains Form
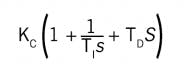
Algorithm:
Generic name: "Series Gain, Series Derivative"
ISA 5.9 proposed name: "Series"
Variety of names in use:
- Rate Before Reset
- Interacting
- Interactive
- Series
Greg: What is your perspective on the conventions used for control parameter settings?
Peter: Fortunately, although vendors use a variety of units for the configurable PID parameters, they are typically prominently defined. Although not so common in contemporary control systems, the proportional term may be specified as “proportional band (%)”. In this case, referring to how much the error (or PV) has to change (%) in order to move the output 100%. Note that whether the gain (G) is specified, or “proportional band” is specified, they are dimensionless i.e. specified without reference to PV engineering units, since scaling at the field transmitter or input processor normalizes the PV.
You will note that I have used Integral gain (%/sec/%) and Derivative gain (%/%/sec) in the Parallel algorithm, which, while used by some vendors, serves here to further distinguish the Parallel algorithm from other forms. Care must be taken in interpreting vendor parameter settings in terms of adopted units when, for instance, Integral action may be required to be entered as seconds or minutes or reciprocal seconds or minutes. Of course, one parameter setting can be readily converted to the other but caution is required if surprises are to be avoided.
Greg: Is ISA 5.9 moving towards establishing names for the various PID Forms?
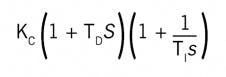
Peter: The Form name should unambiguously define the PID algorithm. One of the challenges is that the name should lend itself to being selectable as a menu item in the user interface of contemporary control system configuration aids, i.e., the name should be succinct. For the generic “Parallel,” the choice is an easy one; the Form name should be “Parallel.” For the generic “Series Gain, Series Derivative,” “Series Gain, Series Derivative,” the name is just too long winded and the leaning is towards naming the Form “Series.” For the generic “Series Gain,” in deference to the fact that the algorithm is commonly used, the Form name “Standard” is proposed.
Greg: What is the confidence level that users and vendors will adopt the recommended naming convention for PID algorithm Forms?
Peter: It is acknowledged that there is some emotional attachment amongst automation practitioners as well as a practical attachment on the part of vendors to the Form names they have traditionally used. It is hoped, however, that in the interest of reducing ambiguity and inconsistency, practitioners and vendors will adopt the proposed naming convention.
Greg: Shinskey and Liptak both refer to the ISA 5.9 “Series” Form as interacting and the ISA 5.9 “Standard” Form as non-interacting. This classification of the “Series” Form as interacting is due to the rate and reset settings interacting in the time domain so that the effective rate setting is never greater than ¼ the reset time setting. For the “Standard” Form, the effective rate setting is the given rate setting leading to the classification as non-interacting. Not realized is that there is a phase shift in the frequency domain for the “Standard” Form. A more proper statement is the rate and reset settings are interacting in the time domain for “Series” Form and non-interacting in the frequency domain and vice versa for the “Standard” Form. Then you have the fact that the gain setting affects the contribution of all the modes for the “Series” and “Standard” Form leading one to say only the “Parallel” algorithm is non-interacting. You can see why Peter says the use of terms interacting and non-interacting should be history.
There are many words of caution about converting tuning settings when going from one Form to another. A particularly unrecognized problem is the start of oscillations when an effective rate time is more than 1/4 the reset time in magnitude that get very severe when the effective rate time exceeds the effective reset time. This is a confusing problem when going from analog or older DCS PID that typically used the “Series” Form to a modern DCS PID that uses the “Standard” Form. The user is perplexed why the PID settings cause large oscillations in the modern PID. The user fails to recognize the need to convert the settings and make sure the rate time is not much larger than ¼ the reset time and never exceeds the reset time in the “Standard” Form. Shinskey saw some benefit for load disturbance rejection in rate settings larger than ¼ for the “Standard” Form but the reduction in robustness and the susceptibility to noise urges caution. For the “Parallel” Form the ratio of derivative gain to integral gain must be less than ¼ the proportional gain squared to prevent the start of oscillations and less than the proportional gain squared to prevent severe oscillations. For more on the conversion of settings see the ISA Mentor Program Q&A post “How do you convert tuning settings of an Independent PID?”
(10) Claim your company’s PID algorithm is unique
(9) Show how your tuning rules are better than a PID tuned for a different Form
(8) Show how your neural network is better than a PID tuned for a different Form
(7) Show how your fuzzy logic controller is better than a PID tuned for a different Form
(6) Show how your academic controller is better than a PID tuned for a different Form
(5) Show how derivate action is detrimental by using a PID tuned for a different Form
(4) Make migration projects more exciting
(3) Get on bandwagon for IIoT as total solution to better plant performance
(2) Keep the ISA 5.9 committee busy just sorting our “fact” from “fiction”
(1) Keep the interaction going with interacting and non-interacting terms

About the Author

Greg McMillan
Columnist
Greg McMillan retired as a senior fellow at Solutia Inc., now a subsidiary of Eastman Chemical, in 2002. He was an adjunct professor in Washington University Saint Louis’ Chemical Engineering Department 2002-04, and retired as a principal senior software developer at Emerson Automation Solutions in 2024.
